- 554 Posts
- 181 Comments
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

 5·9 days ago
5·9 days agoThat’s the one 🤣🤣🤣
Looking at the camera elevation and the 110mm zoom, I’d have to assume it was a very small
skullrock on Mars ;)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
BattleBots on Mars :)
{kind=link}
MG seems to like click bait titles for his YT videos. I try to ignore the titles so I can enjoy the content :)
Hopefully we’ll see more funding on Earth to research on similar coatings that occur here on Earth
{kind=link}
{kind=link}
{kind=link}
{kind=link}
And all the low-lying terrain in this image was under water…
See post (just posted) for the estimated extent of the Paleo Lake : https://lemmy.world/post/19643561
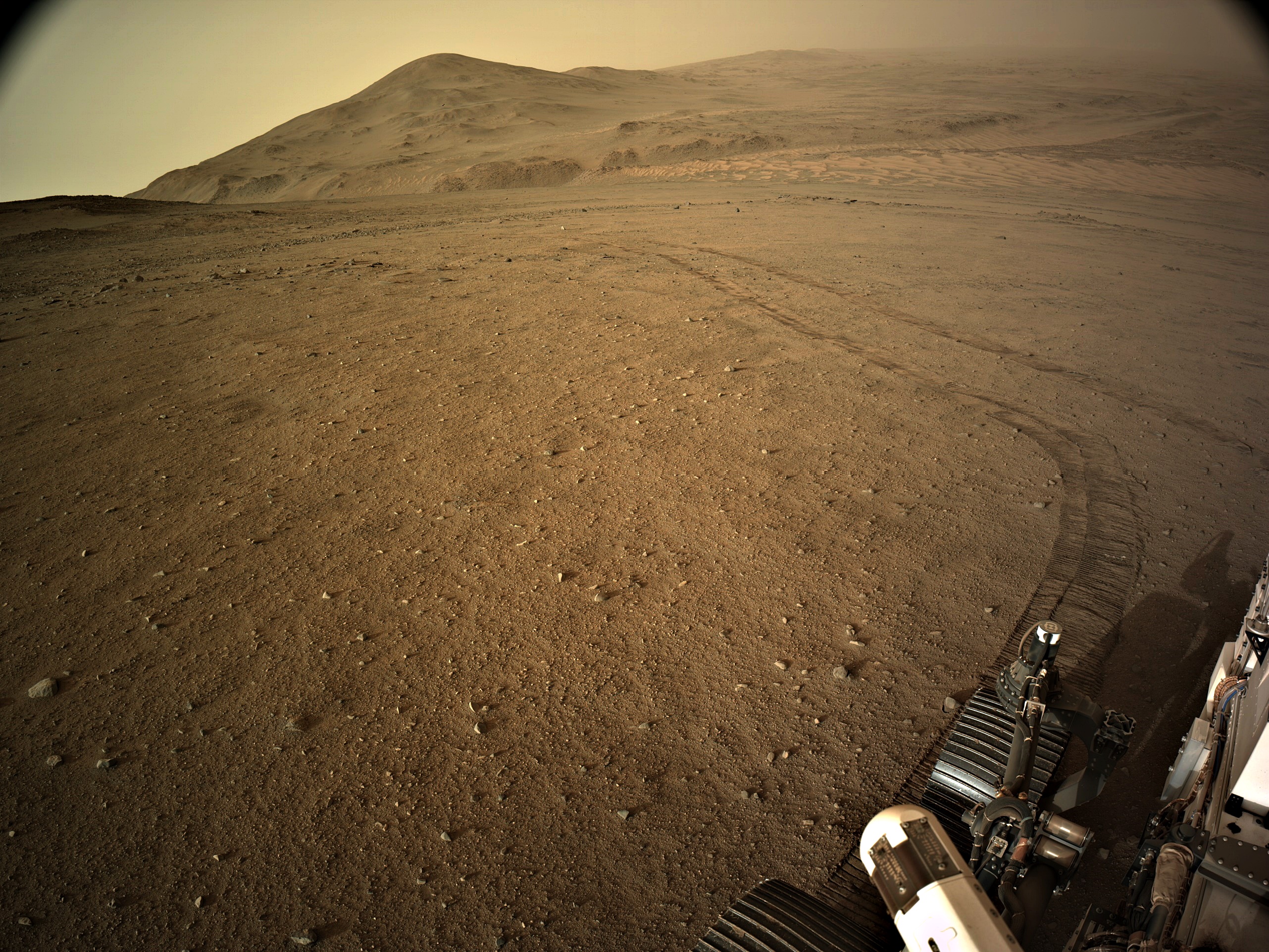
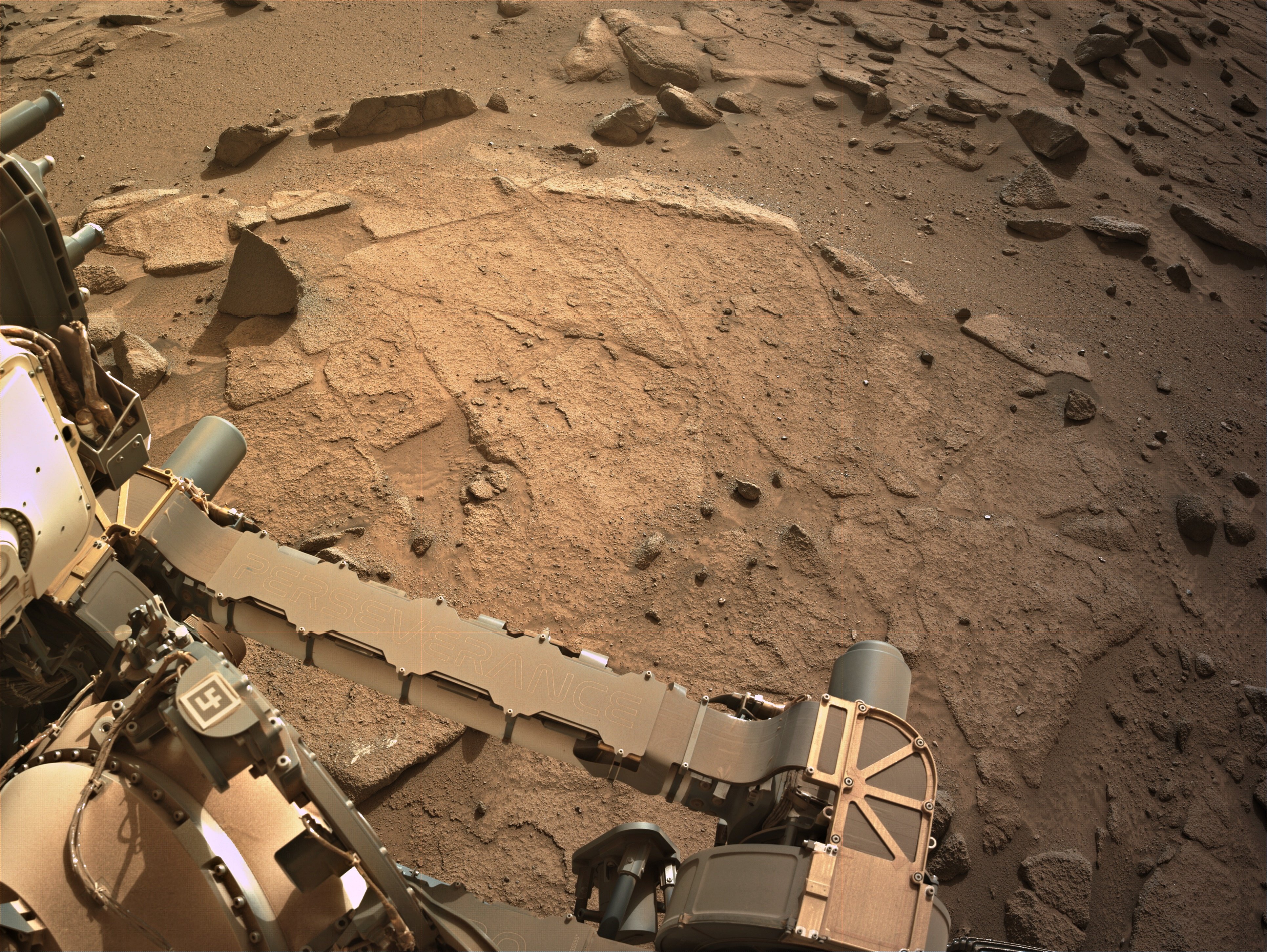
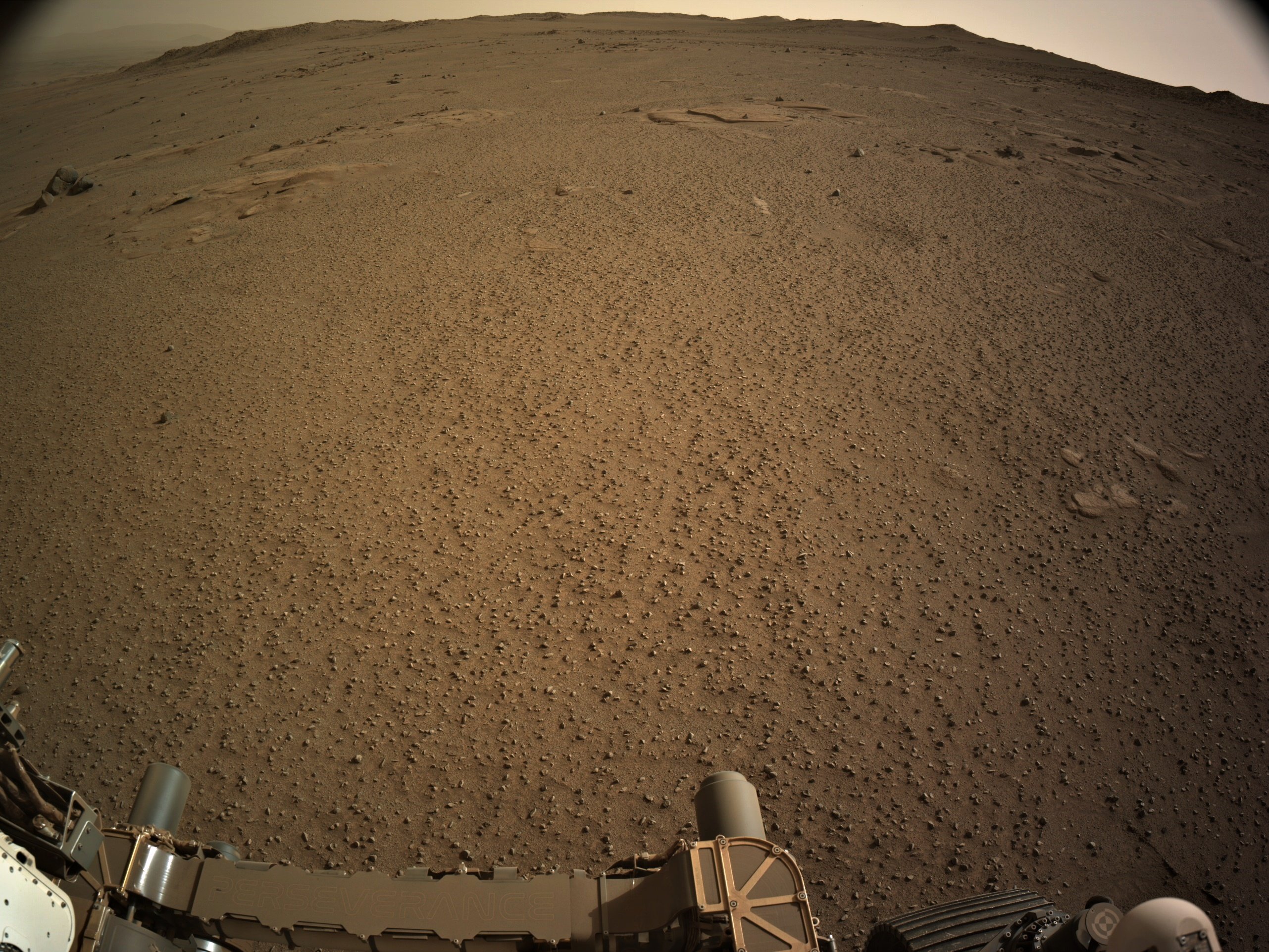
Is that tire patterns in the top left corner?
They are small ripples in the soft sand between rocks, if you look in the NavCam images of the workspace on sol 1254 you can see many more examples.
These ripples are formed by the wind (aeolian process).
Try zooming in and check out the fringing at the edges of many of those rocks. They are ventifacts, carved by the by wind blown sand over eons. Ventifacts are formed by aeolian processes, hence the title. ☺️
Its feature rich and if you get stuck with a tech problem the help team are amazing. Be warned it’s a rabbit hole, once you go in you won’t be seen for weeks 😁
There is an official M2020 blog, but it is really woeful in being updated, when compared with the Curiosity blog. The Curiosity blog has detailed blogs about activities for just about every sol since landing (12 years ago) and all are on their mission page. The M2020 blog is rarely updated. There are mission managers reports (almost daily) available in the mission PDS that you could read, but they are only updated every three months, and the newest ones are ~6 months old. So if you want to read about things that occurred between landing and 6 months ago the you can view lots of stuff using the Analysts Notebook
Analysts Notebook - https://an.rsl.wustl.edu/ (all missions)
M2020 blog: https://mars.nasa.gov/mars2020/mission/status/
MSL blog: https://science.nasa.gov/mission/msl-curiosity/science-updates/
I guess the world will have to wait for those future boots on the ground at the Mars 3 landing site to see if the rover was deployed. Deep down I hope it did get deployed and roved, even it was only a few centimeters / inches. Those boots will be long after I am pushing up the daisies, as I’m already older than dirt… :) But the young ones that follow these exploits on Mars will get to see what happened… :)
AFAIK - The Russian space agency never provided an update on them. Pity, I’d like to have seen them operate ☺️
Sojourner and Zhurong? :)
PrOP-M - 0 ft
Sojourner - 330 ft
Zhurong - 6,302 ft (~1.2 miles)
How many miles total has each rover done?
As of August 4th 2024:-
Opportunity - 28.06 miles
Spirit - 4.8 miles
Curiosity - 19.96 miles (still operational)
Perseverance - 17.23 miles (still operational)
No problem ☺️ Glad you got sorted.
It used to be in meters and feet, but the feet data eventually exceeded the available space, so I switched to km & mi ☺️
OK - I hope I’m with you now? You’re looking for the total traverse distance to compare it with the point-to-point distance? Rather that the last drive distance which I gave you in my last reply?
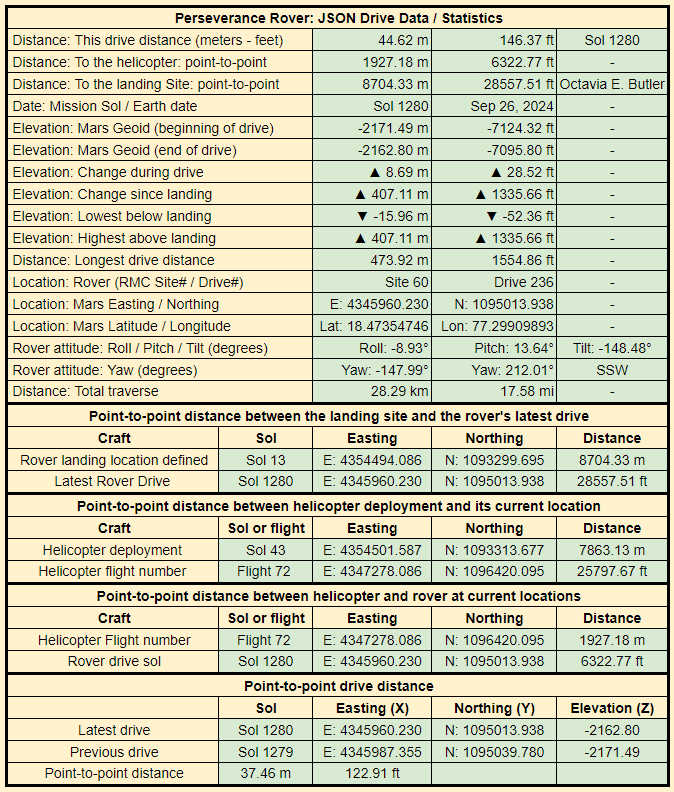
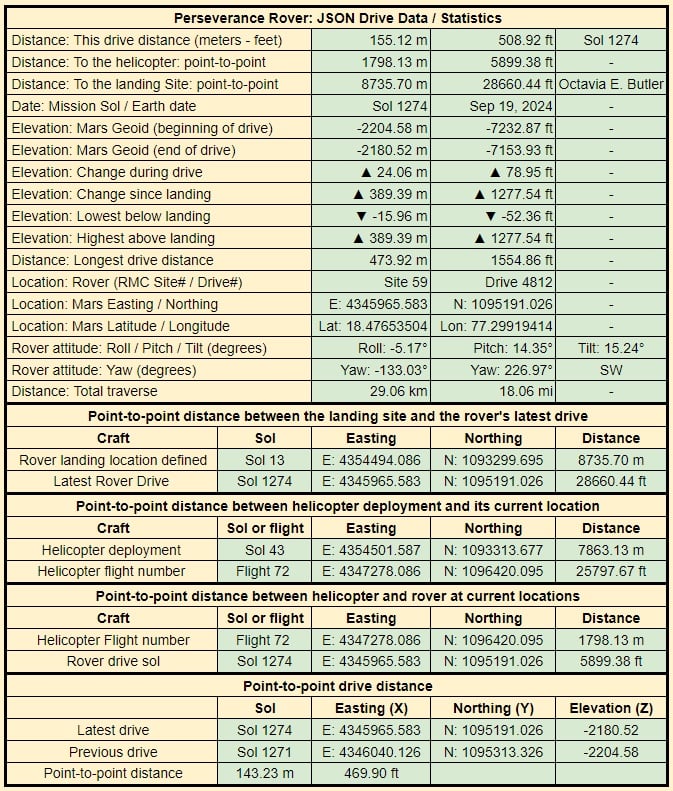
It’s also reported on the same table as “Distance: Total traverse” The current total traverse distance reported by JPL is 27.57 kilometers (17.13 mile). That value is the distance of the path followed by the rover, and is updated after every drive by JPL. The point to distance (from the rover’s current location to its landing spot is only: 8802.14 meters (8.802 kilometers or 28878.42 ft)
There is a an anomaly in the data provided by JPL, but it is relatively small (percentage wise). When we add up all the individual drives reported by JPL the current total is about 130 meters more than the reported total traverse. I suspect that difference was from when they were performing ‘multi-sol drives’ on the approach to the delta, and a part of one drive got double reported.
AFAIK - Individual drives and the total traverse distance account for the uphill and downhill drives (elevation changes) during each drive as they use data from the wheel revolutions etc, and the inertial measurement instruments that tracks every turn and change in elevation during each drive (That data is also provided on a separate JSON feed that shows the change in elevation at a bunch of points during every drive). I choose to only report the elevation at the beginning and the end of each the drive as well as the elevation change since landing to keep the data on one table.
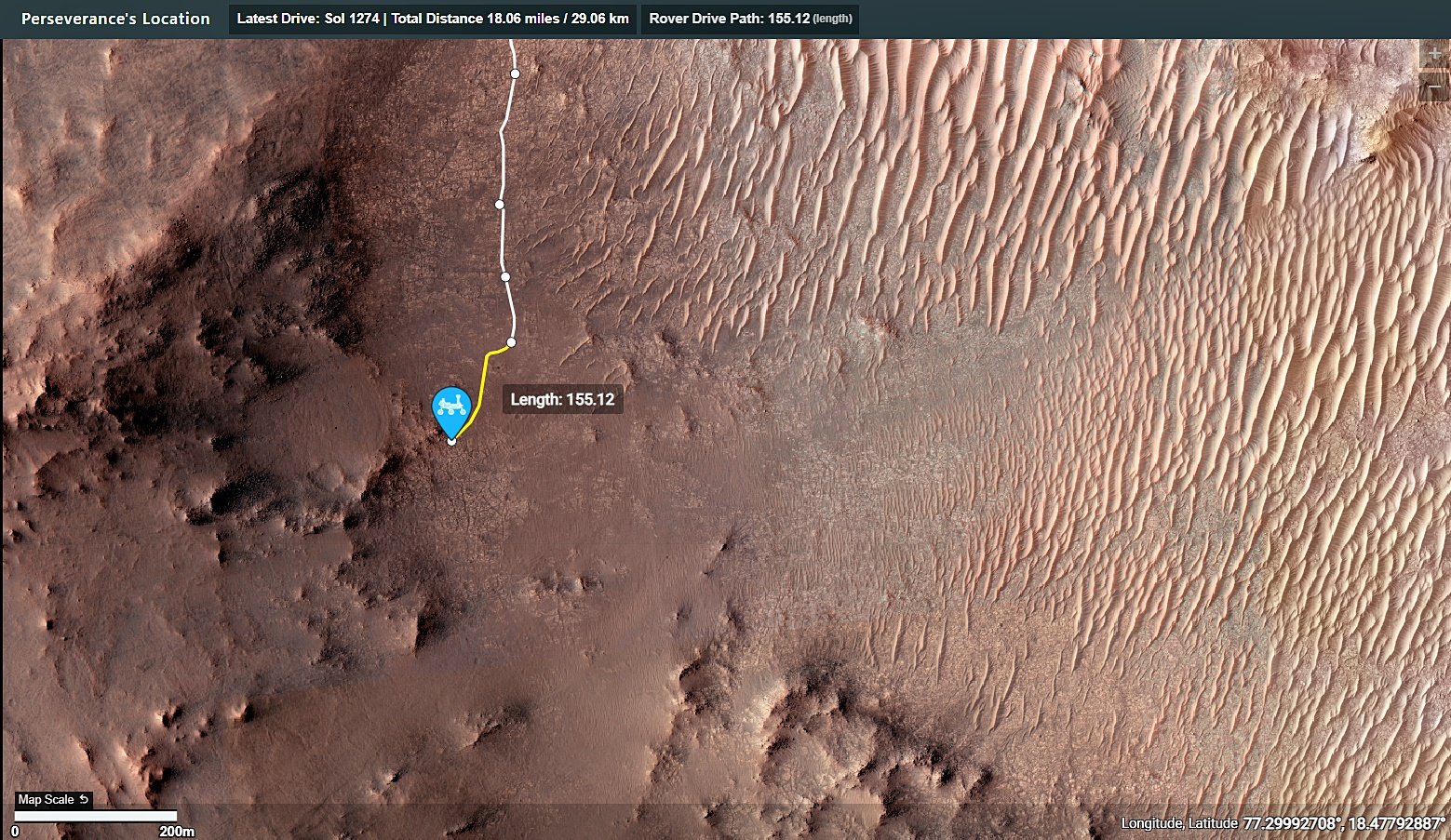
They are both shown in the table. The drive distance is shown is the first line of the table, the point-to-point distance is shown in the last line of the table.
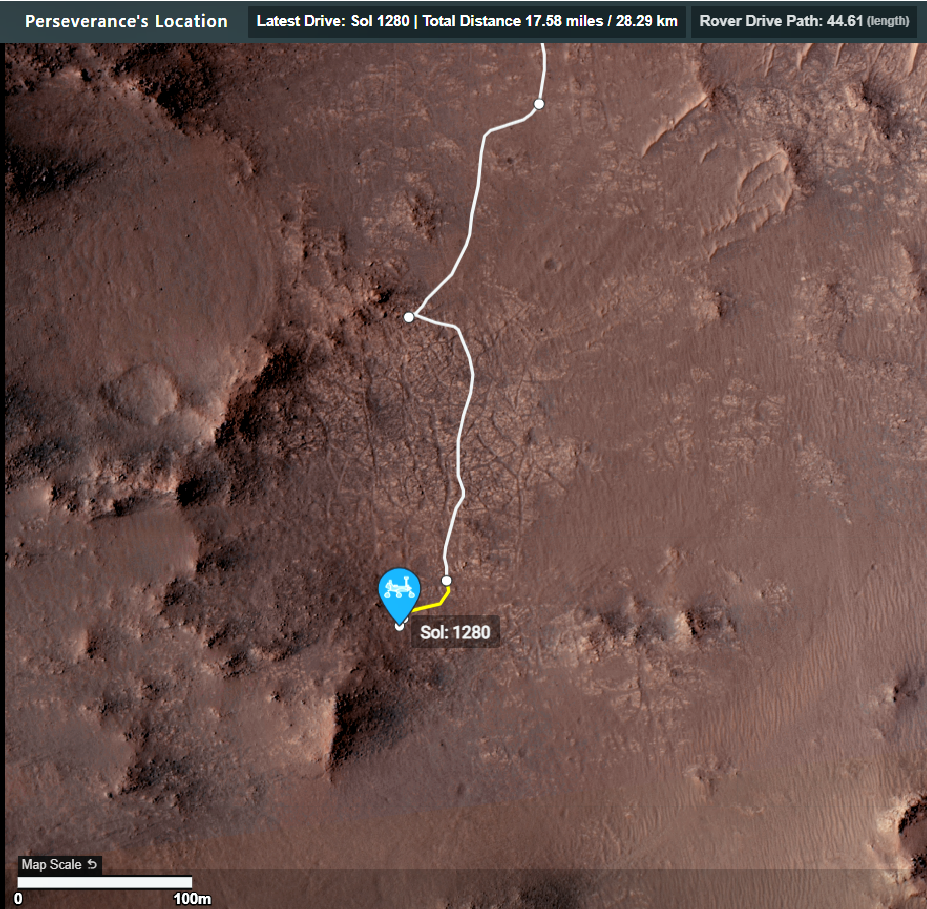
This particular drive was almost a straight line, so there is very little difference between the actual drive path and the point-to-point distance.
Often there is a much larger difference, e.g. when the rover has to traverse around difficult terrain, or when it’s Autonav gets confused by terrain.
The actual distance of the drive path is reported by the rover at the end of each drive. I calculate the point-to-point distance (straight line) using the Easting (X) and Northing) (Y) co-ordinates reported by the rover at the end of the previous drive for beginning of the new drive, and the end of the new drive.
Hope that helps :)
A lot of the issues with today’s kit, is that it’s designed to last only a year or two, just get it beyond warranty period is all the designers are required to do.
I don’t think they’ve discovered this community yet LOL. But when they do I’ll post this video https://youtu.be/aKNjQhIAUp0?list=PLTiv_XWHnOZqCrMU2ppcLjRn1zlDkNx3q
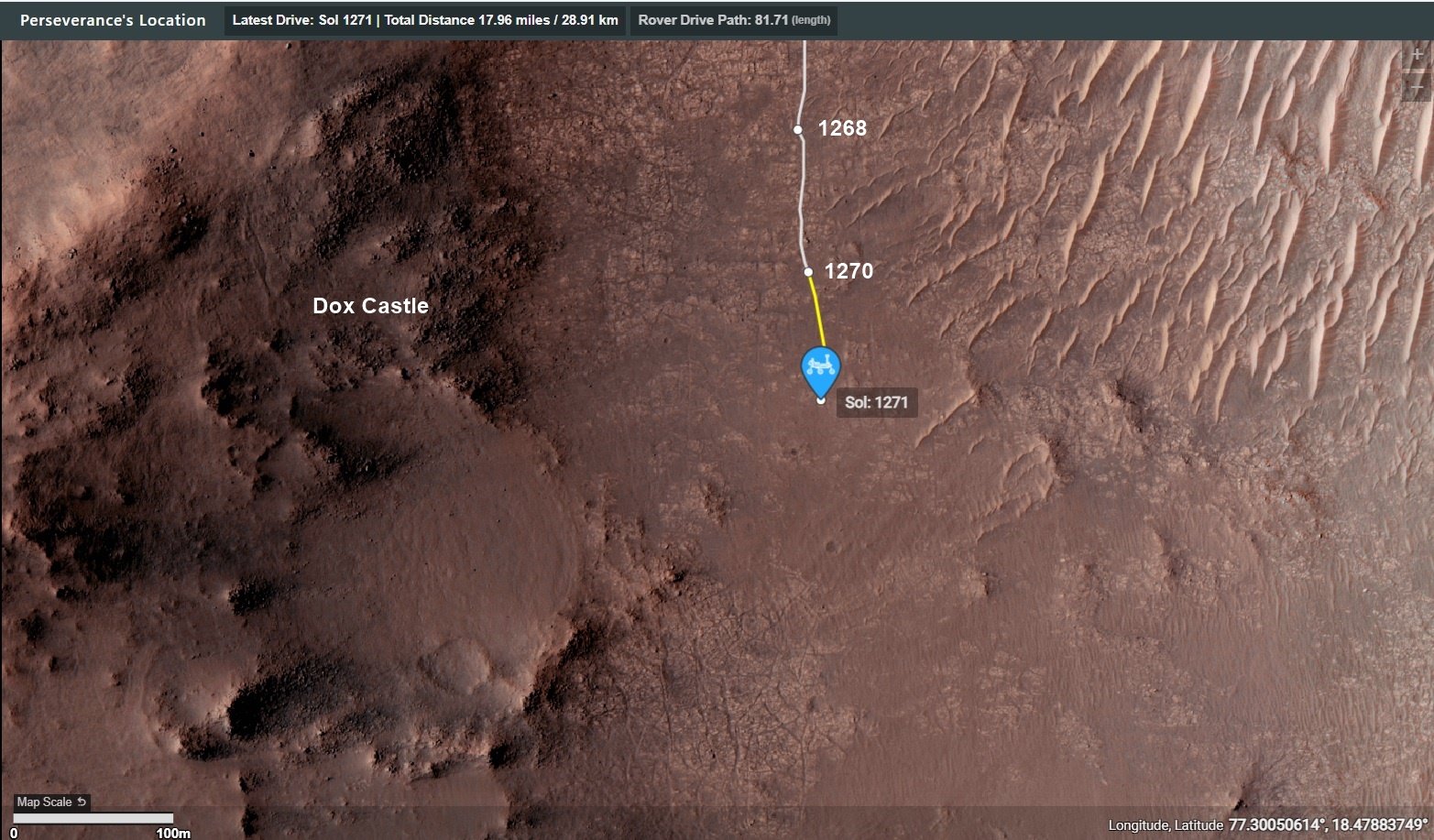
It was, the climb on 1274 currently holds second place on the leader board, the highest elevation climb in a single drive is currently 26.4 meters (sol 1268), but that was over a marginally longer traverse, so probably a very similar average angle. I agree that the team have appeared to pause the drives whenever they spot an enticing target of opportunity :)
Pity we don’t get frequent and detailed mission updates (Like we get on MSL). The PDS mission manager reports are amazing, but they are only made public at least 6 months after the ‘event’