
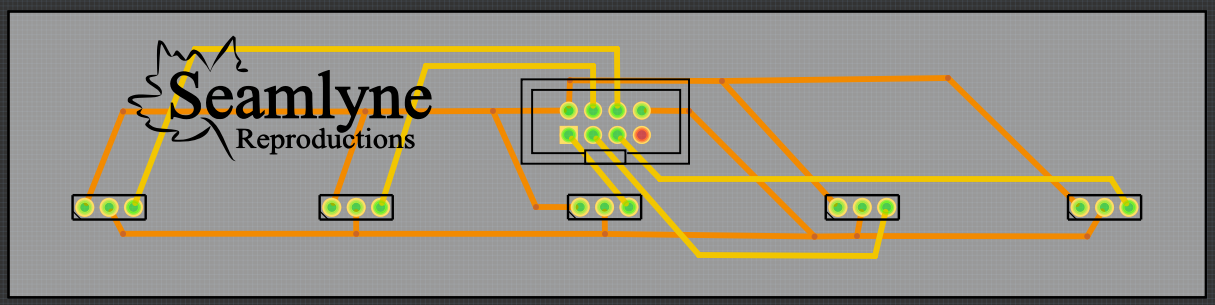
I’m working on a machine that needs five IR sensors to track the edge of a moving loop: position and speed of position change. Since it is 3d printed, the box that’ll hold the sensors was designed in Tinkercad, but I also started the design of the PCB that will connect the sensors to the main board.
Tinkercad enabled me to visualize how it would all fit together: I set the spacing of the sensors and their distance from the base, then used those measurements in Fritzing to design the PCB.

You must log in or # to comment.